
Teaching Robotics
New Hampton Community School · Grade 11
LEGO themes + Scratch control.
Guided fifth graders through building themed LEGO robots and programming motion/logic in Scratch. Organized team activities and basic iteration habits.
Designing electromechanical systems integrating simulation, precision, and tangible interaction.

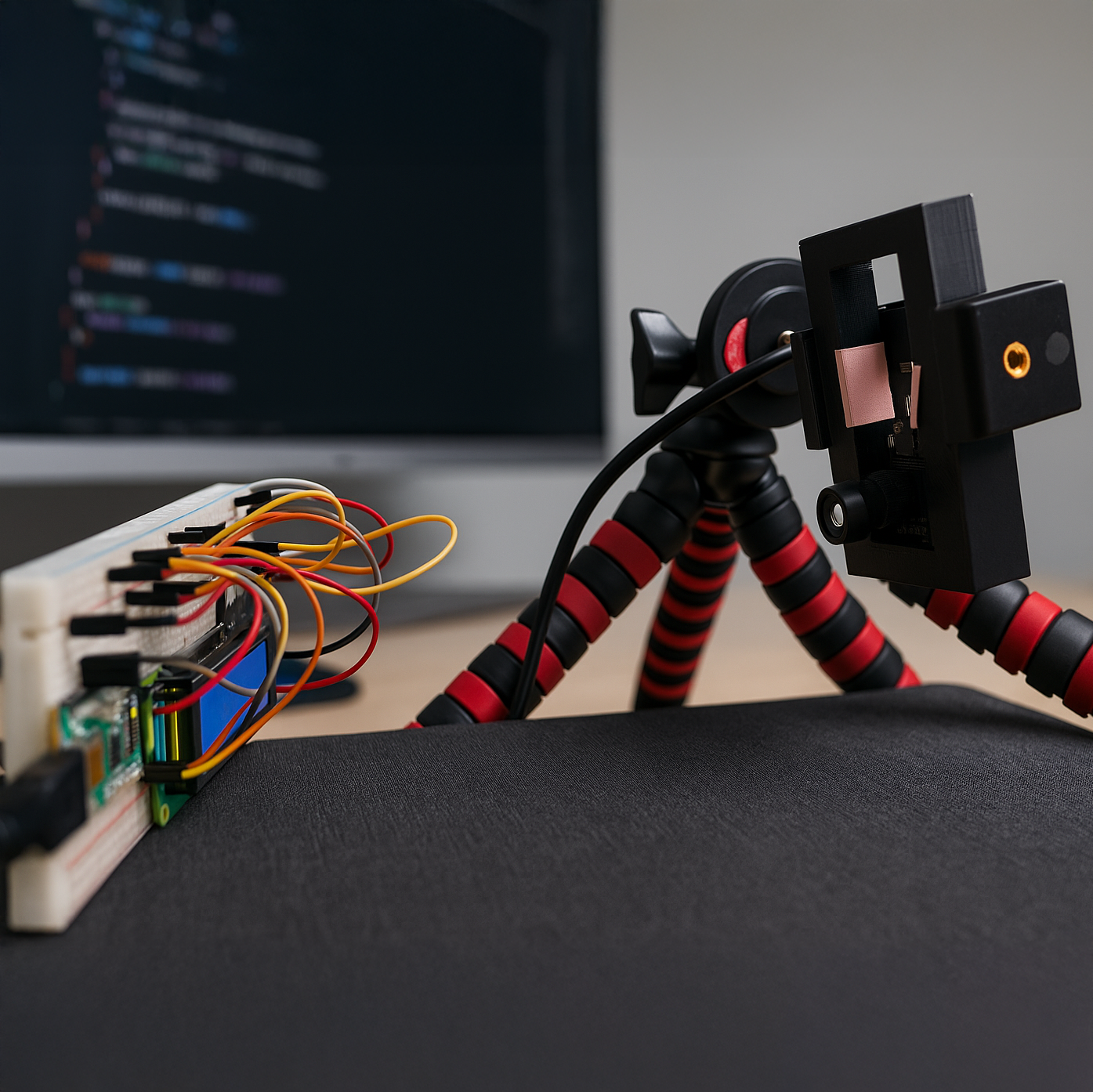
OCR + CNN pipeline · Grade 12
Camera-to-classifier workflow for reliable readings on physical gauges.

Low-cost ball pickup robot · Team lead (4)
Designed a practical ball-pickup system to remove practice downtime.

New Hampton Community School · Grade 11
LEGO themes + Scratch control.
Guided fifth graders through building themed LEGO robots and programming motion/logic in Scratch. Organized team activities and basic iteration habits.
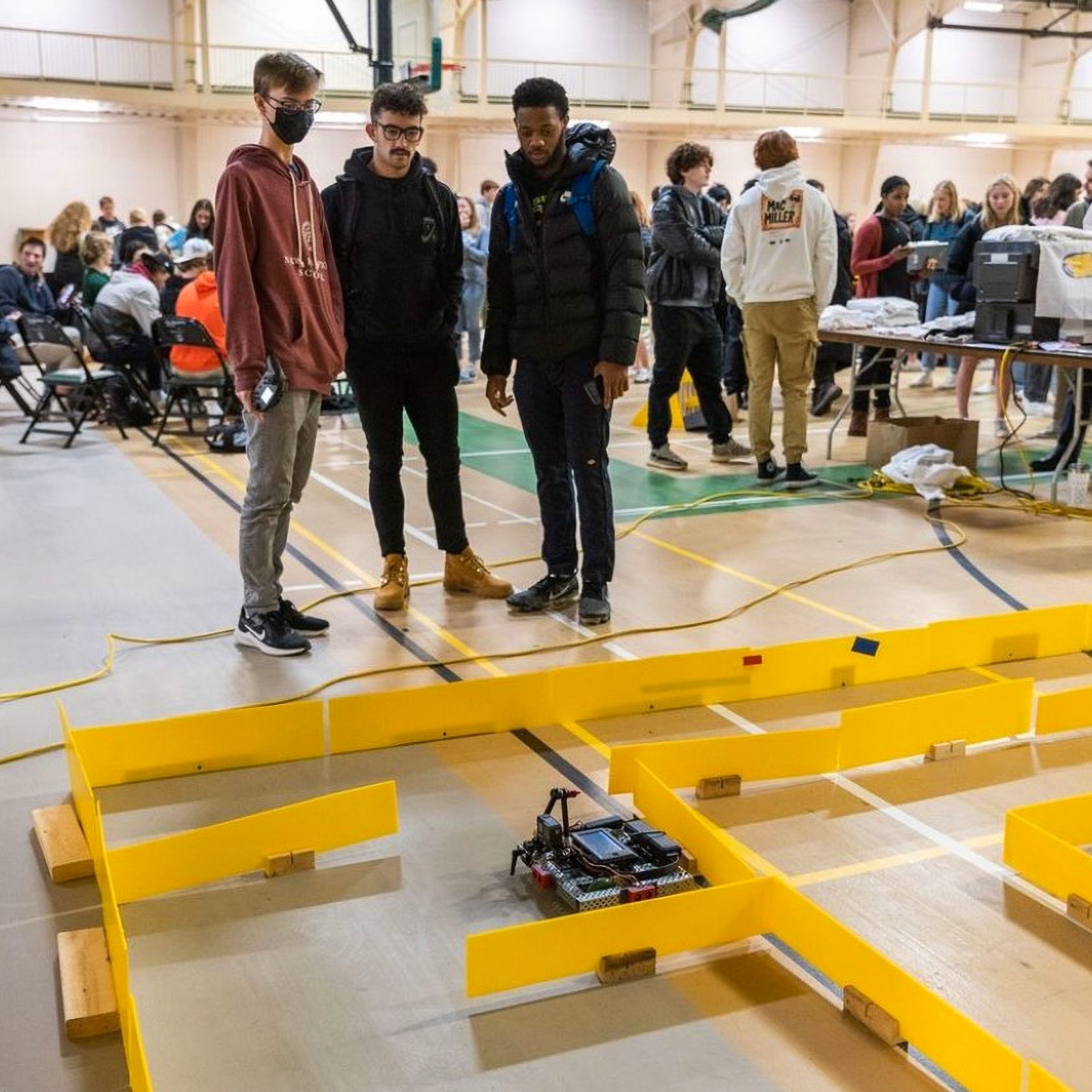
Grade 11 · Search algorithms & sensing
Search algorithms & sensing.
Built a maze-solver with local sensing and implemented multiple search strategies (e.g., DFS/BFS variants). Later used as a coding-class demo.